Prototype DRO based on imported vernier calipers
Update Feb 12, 2010
Coded up a PIC 16F688 to read the scales.
Added opto coupler and switch input to PIC for zeroing scales.
Using VFD for display
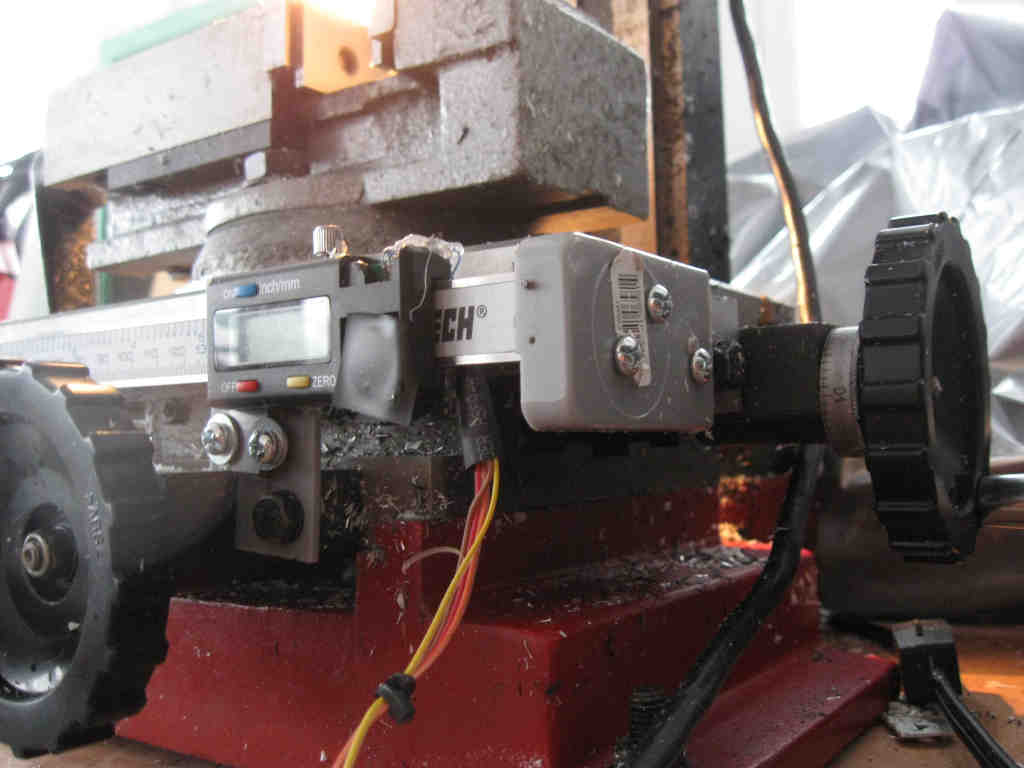
Mounted scales on the HF micromill
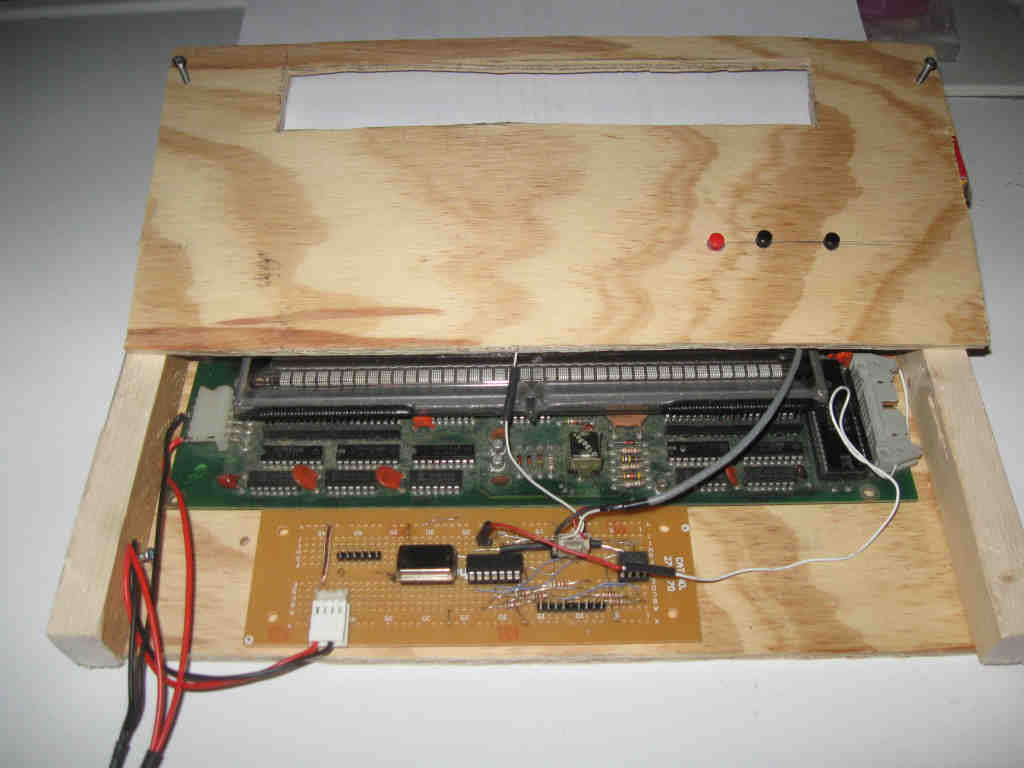
Controller board

Mounted controller board
Mounted scales isolated from micromill.
X-Axis right side
Y-axis

Original Prototype
Take one USB-ST4 and recode it to read the protocol from the caliper
Take one old VFD left over from my old scope here
Add vernier from HF model 47257 or 98563
Add voltage comparator to bring the 0-1.5V swings up to something the PIC can see
Mix well

A view from hyperterminal while moving the vernier through the zero point:
Note on imported calipers: The protocol and clocking rate is dependent on
WHEN you purchase and the following describes two I have, yours -MAY- be different!
See this page for example of different protocol
The calipers I have output at a 72khz clock rate
Data is valid on falling edge of clock
Approx interval between transmits: 300ms
BCD coded data
LS nibble first
7 nibbles total
6 nibbles of position info then 4 bits of:
bit 0: "+" = 1, "-" = 0
bit 1: 0.5 indicator (5/10000's inch or 5/1000's of a mm)
bit 2 and 3 not decoded yet, one is for sure to indicate Metric/English
If metric then first 2 nibbles are right of decimal point .XX of a mm
and next 4 nibbles are left of decimal point
If English then first 3 nibbles are right of decimal point .XXX inches.
A trace taken using Andrew J's Cheap and Nasty logic analyzer:
Reading +1.0000 inches